-
 Gitefu
Gitefu
- 24 Jun, 2025

今年ももう10月ですか、早いですね…
さて10月といえば我々の団体としてはMFTが恒例のイベントなわけですが、今年も例にもれずMFT2025へと出展しております。
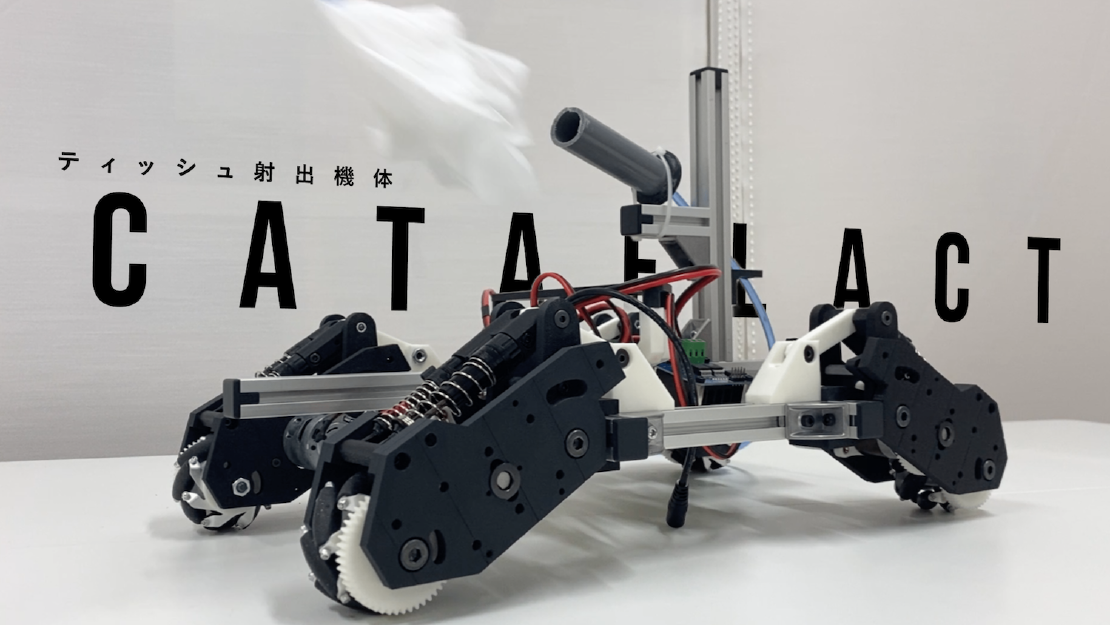
今年は “ティッシュ射出機体 CATAFLACT"と題してティッシュを射出するロボットを作成しました。

今年の機体の目玉機能は「UltraWideBand(UWB)によるユーザー追尾」「LAN経由での書込」 「変形機構と射出機構」あたりでしょうか
見出しを見るとなんだこいつはとなるかと思いますが、要はAirTagを使っています。 機体側にiPhone、ユーザー側にAirTagを配置し、機体に搭載されたカメラでiPhoneの画面に 対して画像認識を行うことで機体に対するユーザーの方位と距離を取得しています。
マイコンには昨年同様Linux環境とベアメタル環境を同一チップ上で稼働できるMilk Vを使用しています。 ベアメタル環境はArduino IDEで開発ができるのですが、昨年は書込みの度に対象のMilk VにUSBケーブルをつなぐ必要があり開発やデバッグで苦戦しました。
今年はMilk VのLinux側に書き込むSDKと、Arduino IDEのボードファイルを改造し、LAN経由で 書込みをできるようにしたことでソフトウェアの書き換え作業がとても簡単になりました。
例年通り、メカ設計のチームの努力により素晴らしい機構が搭載されています。
足回りは変形させることで車高の調整が可能です。 また、サスペンション機構も付いており移動に伴う車体の傾きを低減することができます。
ティッシュを射出する上で重要なティッシュを1枚づつ取り出す部分も、専用の機構設計で実現されており、 スライダクランクとカムを組み合わせた機構が使われています。

